Description:
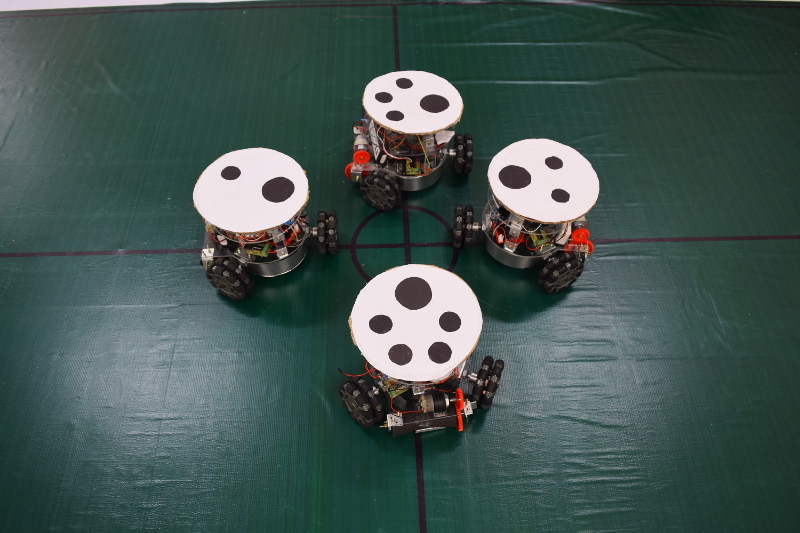
The system comprises of a set of four omnidirectional robots endowed with the ability to
play soccer. The robots are designed to perform various functions including passing,
shooting, dribbling and goalkeeping.
The central computer localizes the robots incorporating feedback from overhead camera. Control commands
are sent from the central computer to the robots through WiFi communication.
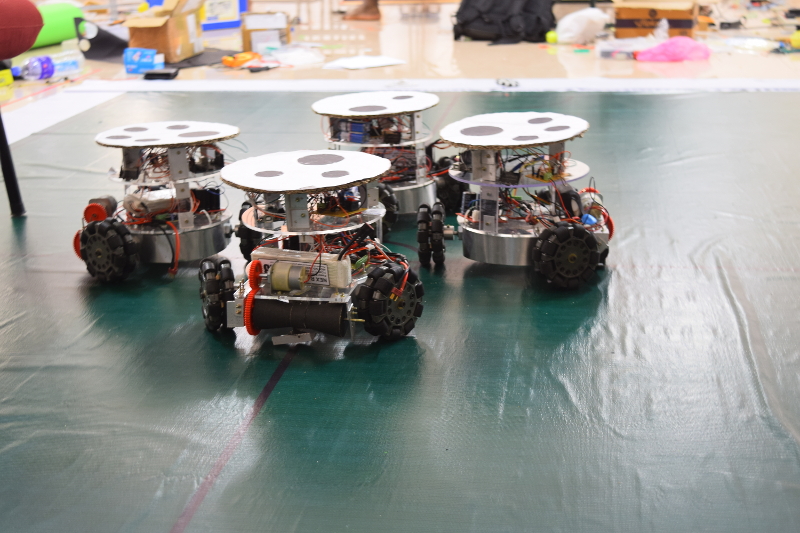
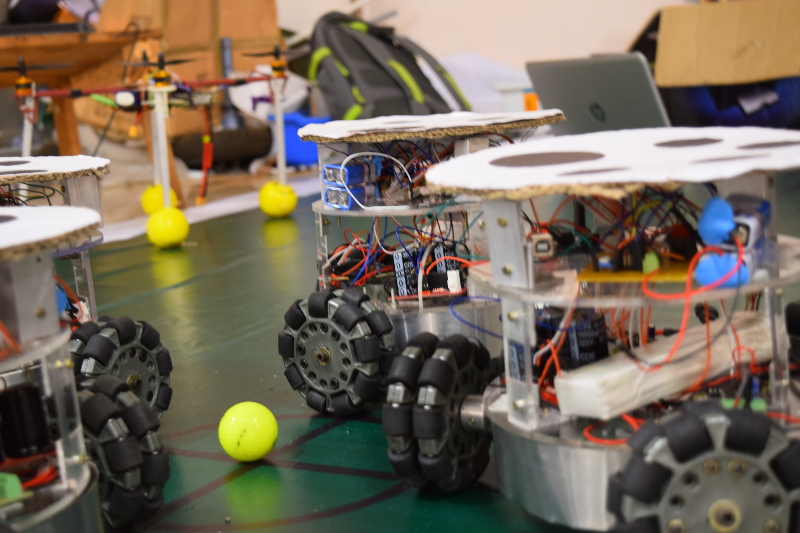
Robot Design:
The robot is a three-wheeled omnidirectional robot. The chassis was designed in SolidWorks and fabricated with acrylic. The shooting is done by a solenoid kicker powered by a boost converter. The dribbling mechanism consists of a custom designed dribbler powered by a motor through a gear train.
Control:
The control of the robot is done by utilizing the kinematic model of the robot. The setpoint for the goalkeeper's control system is generated based on the location of the ball found using overhead camera.
Navigation:
Navigation for each robot is done by using a high level planner to plan a global path and this is followed by a piecewise polynomial trajectory optimization. The resultant trajectory is tracked using a PID controller.
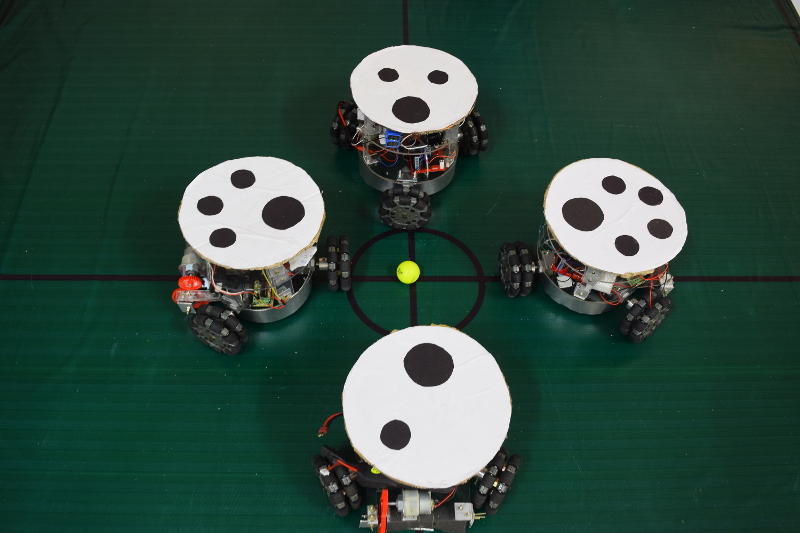
Robot and Ball Localization:
The robots and the ball are localized using the overhead camera. The open-source image processing library openCV is used for image processing. A unique pattern ID is affixed on top of each robot to identify it. The trajectory of the ball is predicted from the localization data.