Description:
Mobile Robotics Development Platform is a differential-drive robot capable of mapping an environment using low-cost sensors and navigating using the generated map. It provides a platform to test perception and navigation algorithms. The robot uses ROS - running on an on-board computer - as an interface between the sensors and actuators.
Robot Design:
The chassis of the robot was fabricated using acrylic and has three layers. The bottom layer contains actuators, batteries and other heavy components to lower the center of mass. The middle layer contains electronic components. The top layer supports the onboard computer.
Mapping and Localization:
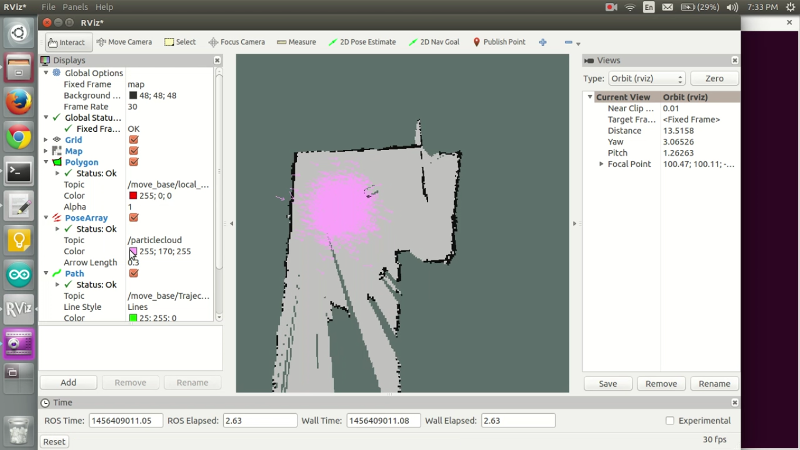
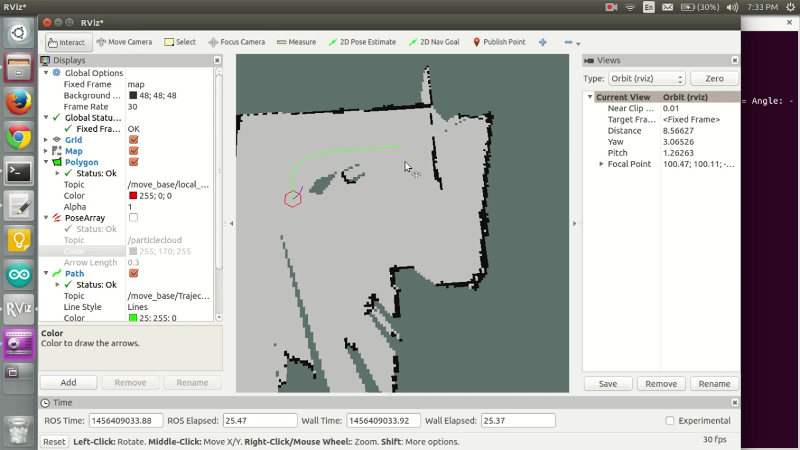
To navigate in a GPS-denied area, mapping of the environment is required. To achieve this,
point cloud data from a kinect sensor along with orientation from IMU and
odometry from wheel encoders are used. A package called gmapping in ROS is used to perform the
mapping of the environment.
More than one sensor is used to increase the accuarcy of the system as the sensors are prone
to noise. IMU and kinect sensor information is fused to improve the accuracy of the map generated.